FLL Judging Category · Innovation Project
Innovation Project
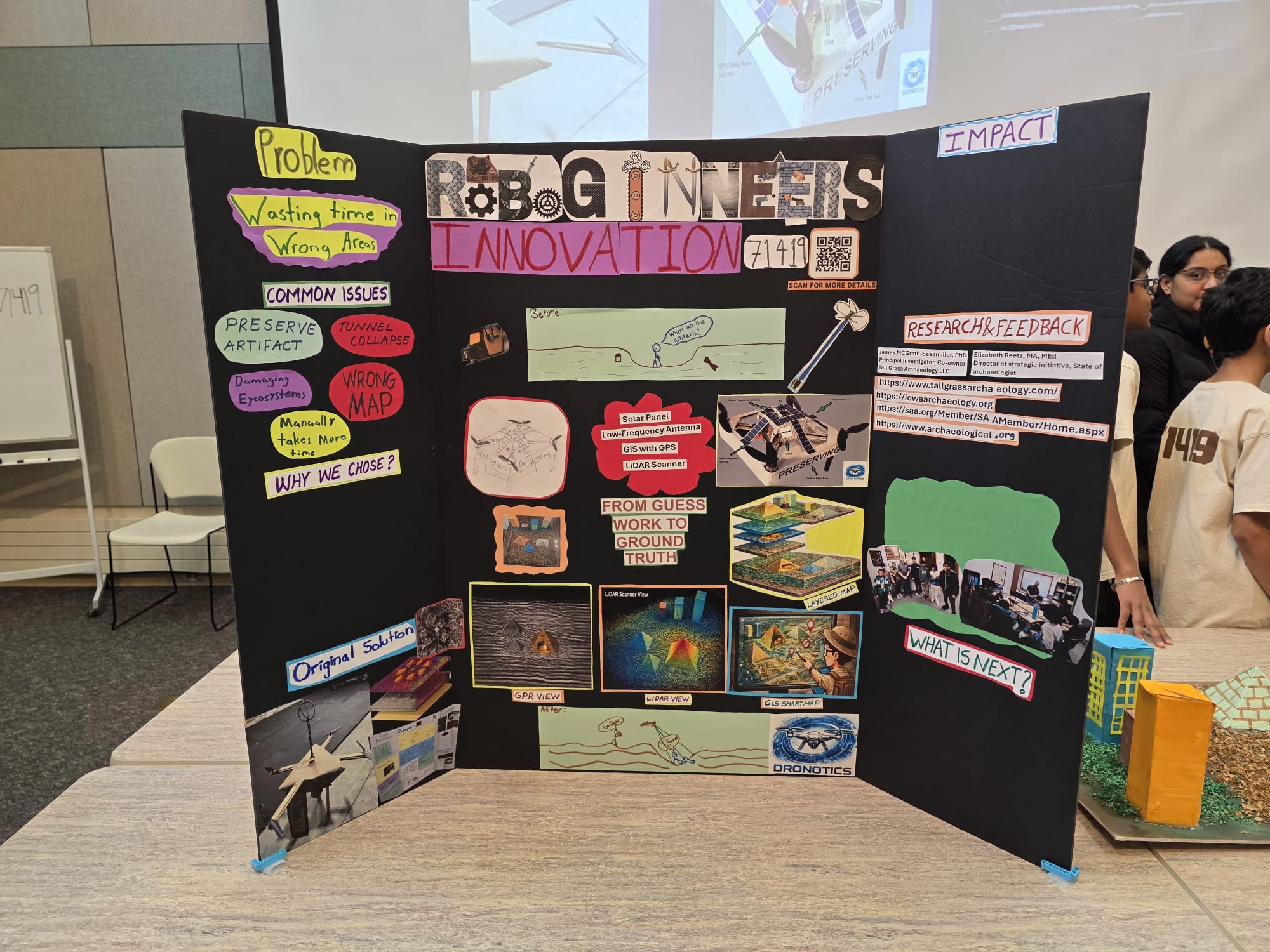
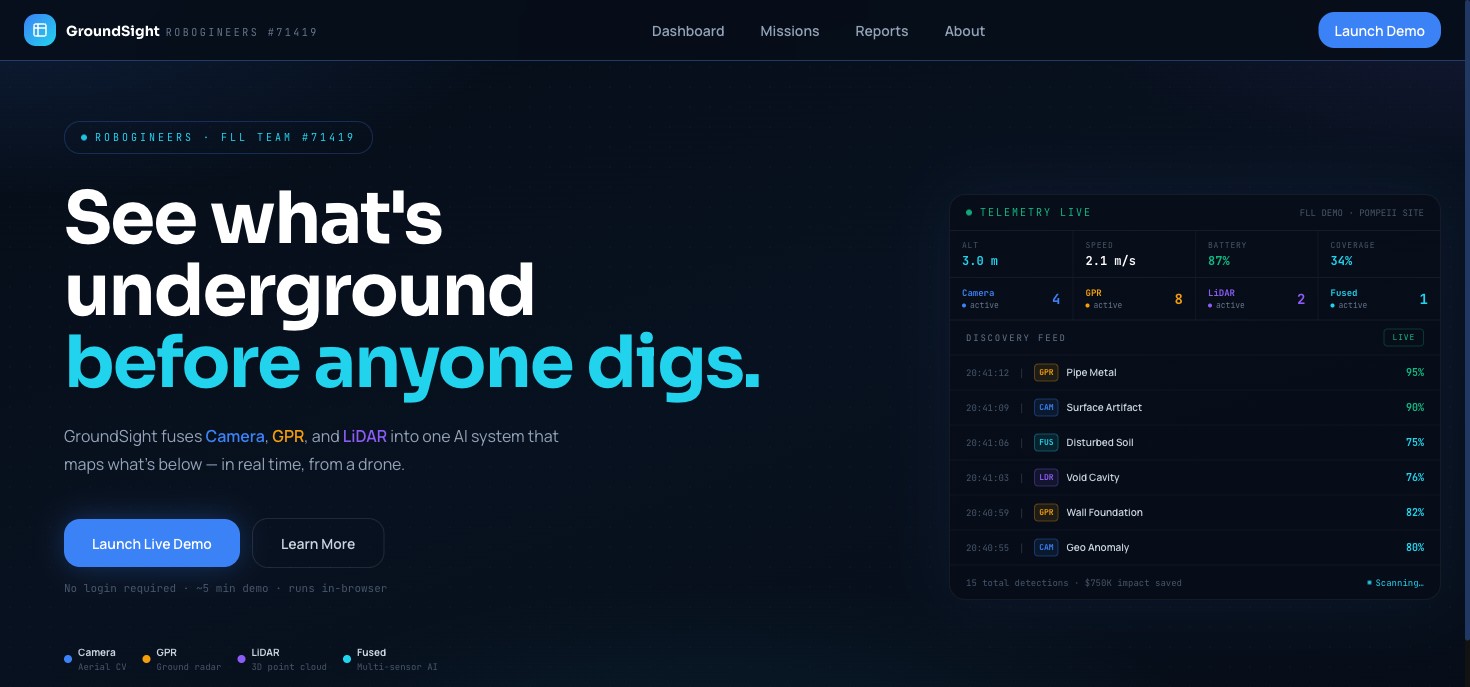
DRONOTICS · Precision Remote Sensing Ecosystem
LiDAR Scanner
Penetrates dense jungle canopies to generate 3D bare-earth topography, revealing hidden ruins unseen for centuries.
Dual GPR
Ground Penetrating Radar detects buried masonry and subterranean density anomalies without disturbing a grain of soil.
GIS Mapping
Coordinate-syncing sensor hits to a global grid for layered, high-precision digital site documentation in real-time.
AI Detection
Custom computer vision models trained to identify artifact shapes and construction patterns automatically during flight.
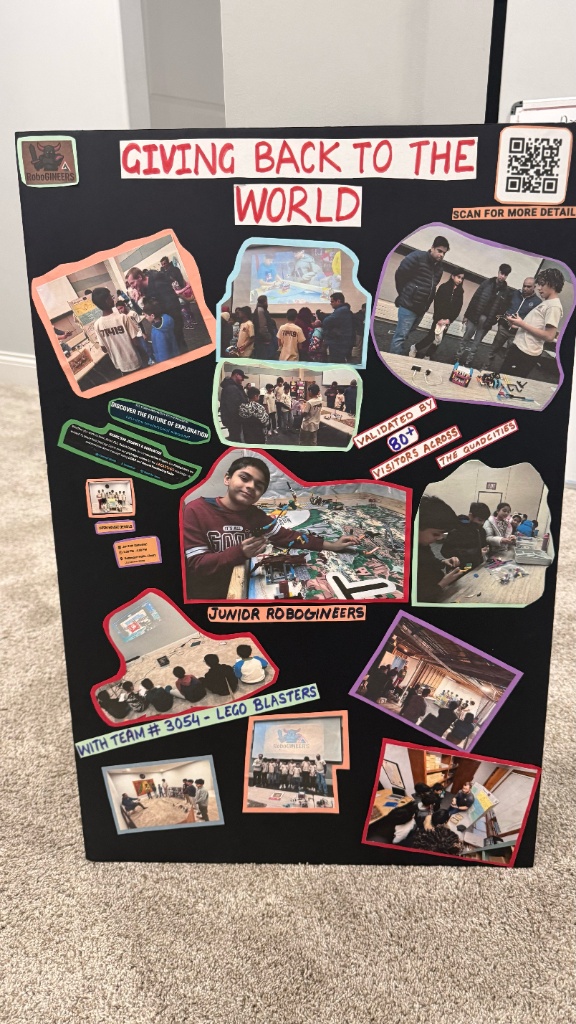
Scalability & Impact
Solving a $30B–$61B Annual Crisis
Underground utility strikes cost the U.S. economy $30B–$61B annually (CGA DIRT Report). Our GPR technology maps subsurface infrastructure before the first backhoe arrives.
📈
Our Forecast · 90% Reduction by 2030
If drone-based pre-scan technology like DRONOTICS is adopted industry-wide, the CGA projects up to 90% reduction in underground damage incidents by 2030.
Annual U.S. Underground Damages200,000+ incidents
Average Fine per Utility Strike$50,000+
DRONOTICS GPR Pre-Scan Cost~$100
Prototype Budget
$9,000
Dual GPR Suite$3,500
LiDAR Mapping Unit$700
Hexacopter Airframe$200
AI/GIS Stack$1,600
Calibration/Misc$300
Hybrid Power System$2,700
Total Estimated$9,000
Beyond Archaeology · 5 Fields That Need Ground Truth
Utility Detection
Upgrade 811 "call before you dig" with pre-scan drone surveys
Construction
Safe site surveys before breaking ground on any project
Environment
Subsurface contamination mapping without invasive drilling
Disaster Response
GPR already locates survivors in collapsed structures
Mining
Plan safe excavation paths before any digging begins
DRONOTICS Prototype Specifications
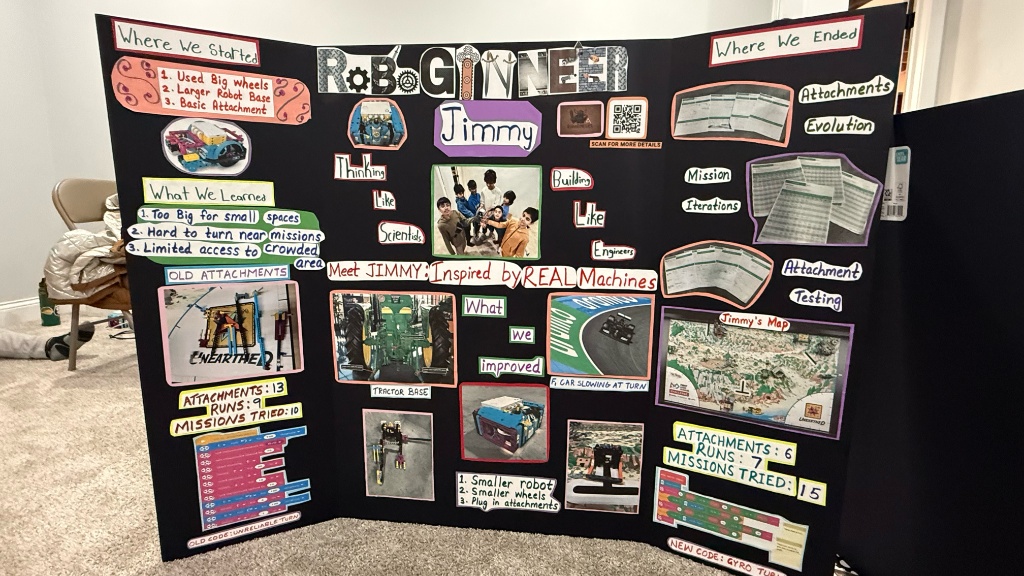
Innovation Project · Design Iterations
"We don't lose. We either win or we learn."
Iteration #1 · Power Source
Battery → Hydrogen → Hybrid
What Happened: Battery-only couldn't sustain full-sensor flight. We explored solar, then researched hydrogen fuel cells — but discovered they aren't widely available for real-world field deployment.
Researched & Rejected
Hydrogen fuel cells — scientifically sound, not field-viable. We documented why and moved on.
The Fix
Hybrid battery + gas engine — 40-min runtime, fully field-deployable.
Iteration #2 · Sensor Selection
HSI vs. Dual-Frequency GPR
What Happened: Initially considered Hyperspectral Imaging (HSI), but discovered it was surface-only and too expensive ($25k+).
The Fix
Switched to Dual-Frequency GPR ($2.2k) — sees underground, fits our budget, validated by Dr. Seegmiller.

Version 1 · $45,000
Cardboard prototype — wrong sensor, over budget, didn't work
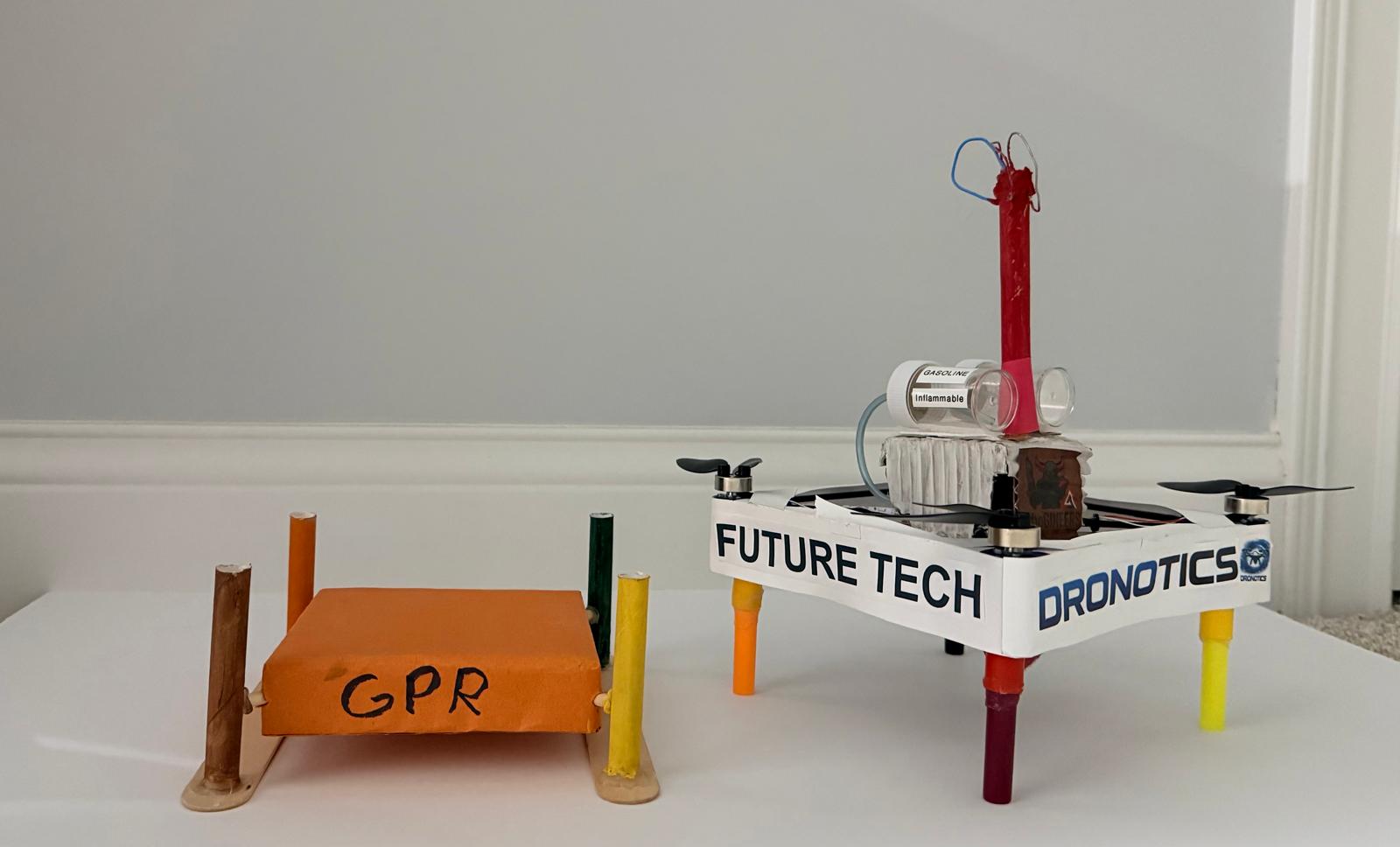
Version 2 · $9,000
Carbon fiber, dual GPR — expert-validated, field-ready